
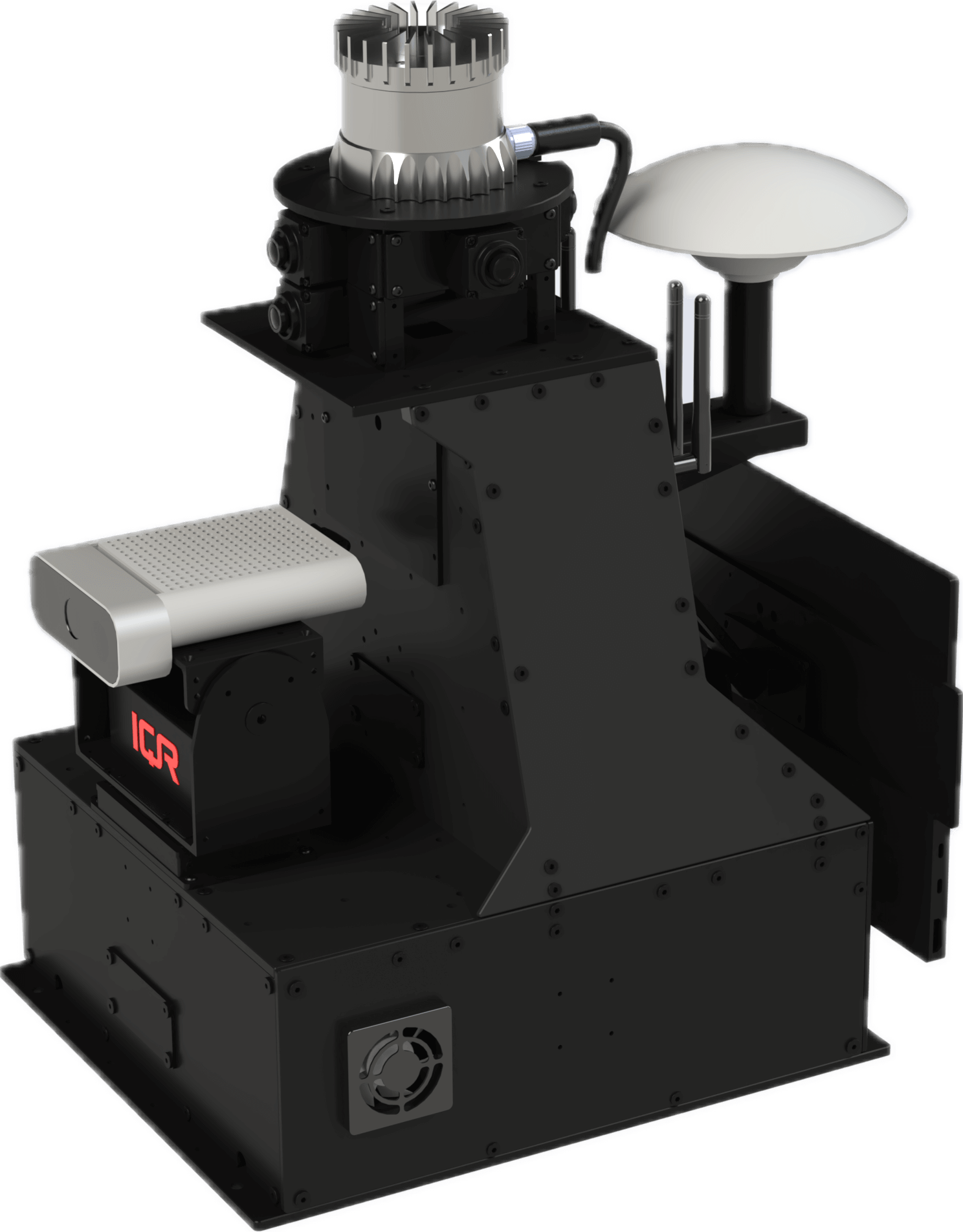
机器人上装产品概述
智科特多模态传感器上装为移动机器人开发者打造零门槛、高精度、全融合、高性价比的环境感知解决方案,适配市场主流移动机器人产品,让用户能迅速开展科研、应用工作。
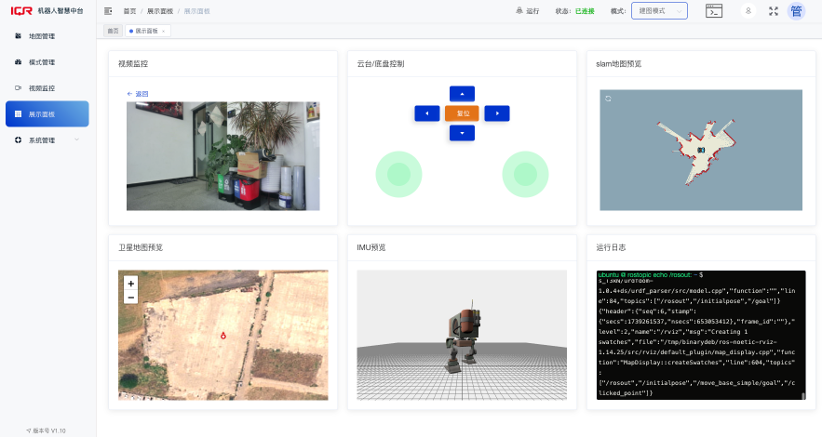
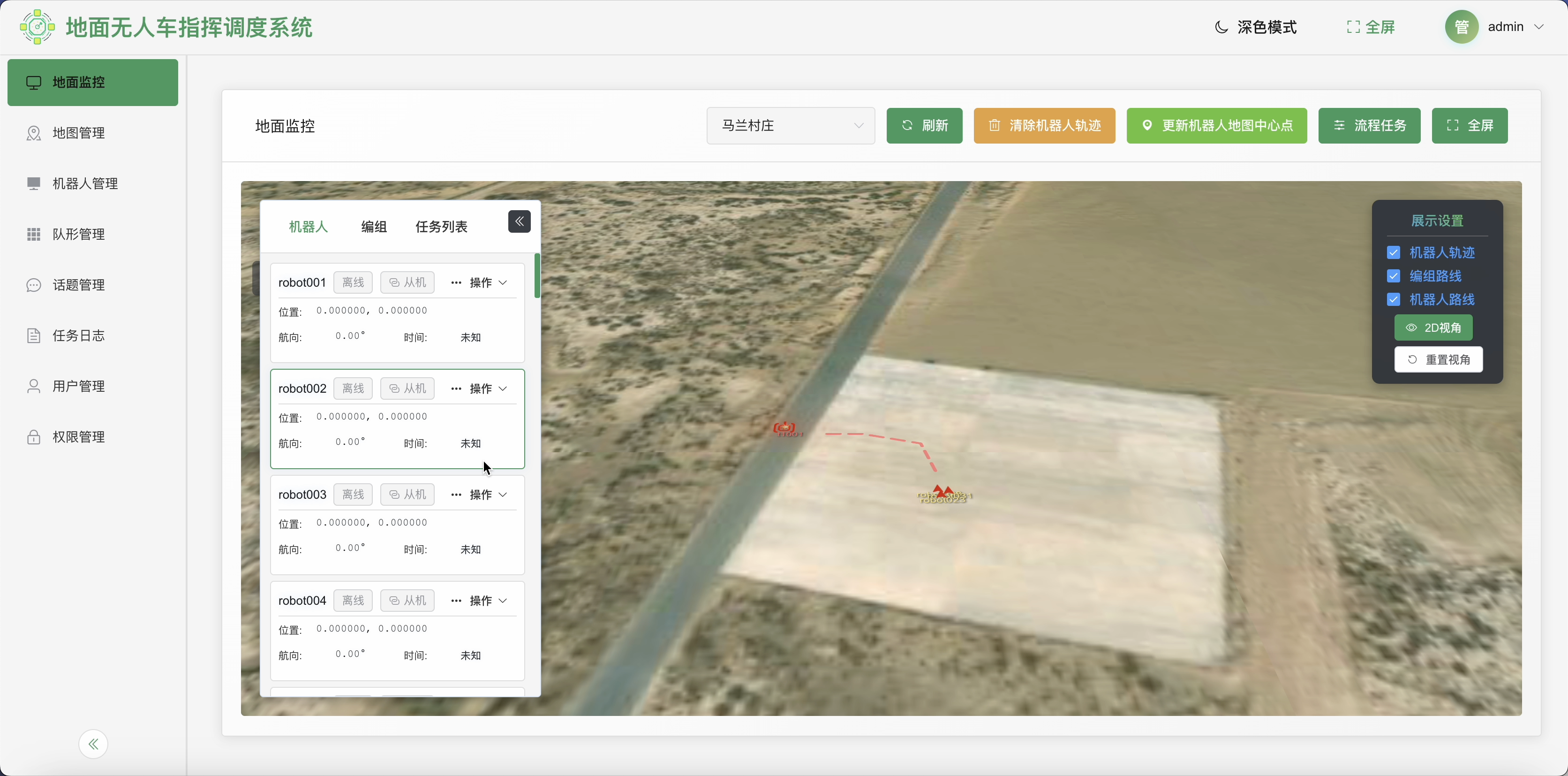
对于非机器人领域用户,我们开发了完整的机器人中台软件,用户可以在不操作ROS的情况下,使用机器人完成领域应用。
零门槛使用
无需深厚ROS知识
高精度感知
多传感器融合技术
全融合方案
多模态数据融合
高性价比
降低研发成本
核心功能
专为已选定移动机器人平台的科研用户打造的全方位解决方案
多源传感器融合体系
兼容激光雷达、视觉模组、惯性导航主流传感器,构建多模态感知网络,实现环境的全方位精准感知。
- 激光雷达数据融合
- 视觉模组深度感知
- 高精度惯性导航
- 多模态数据同步处理
可扩展研发框架
预留二次开发接口,适配 SLAM、环境建模研究方向的技术迭代需求,加速科研创新。
- 开放API接口
- SLAM算法适配
- 环境建模工具链
- 技术迭代兼容性
广泛的应用场景
科研教育
高校机器人实验室教学与研究
工业巡检
工厂自动化与设备巡检
医疗服务
医疗机器人与辅助系统
物流仓储
智能仓储与物流机器人
机器人上装系列产品
根据不同应用场景和需求,提供多样化的产品选择
科研专用
科研版
¥4.5万面向高校和研究机构的高端解决方案,提供更强大的计算能力和更丰富的接口,支持复杂算法研发。
核心配置
- 32线激光雷达
- 云台深度视觉系统
- 差分GPS
- 多机系统支持
- 二次开发工具包
热门选择
应用版
¥10.5万(根据所选配置调整)面向商业应用的标准化解决方案,提供稳定可靠的环境感知能力,满足大多数移动机器人应用需求。
核心配置
- Ouster OS1 64线激光雷达
- 深度视觉系统
- 高精度IMU
- 机器人中台
- GMSL2接口
产品参数对比
| 参数配置 | 科研版 | 应用版 |
|---|---|---|
| 上装版本 | 科研版 | 应用版 |
| 底盘 | ROS移动平台 | ROS移动平台 |
| 计算单元 | Nvidia Orin NX | 米文动力 AD10 |
| 激光雷达 | 速腾聚创 Helios32 | Ouster OS1 64线 |
| 深度相机 | 奥比中光 Femto Bolt | 奥比中光 Femto Bolt |
| 差分GPS | Wit WTRTK 4GA | Wit WTRTK 4GA |
| IMU | Wit HWT 6052 | Wit HWT 6052 |
| 显示器 | 9寸显示器 | 13.3寸显示器 |
| 接口配置 | 4×USB3.0, 2×千兆网口, HDMI 2.1, GMSL2, Wi-Fi 6, 蓝牙5.0, RS232/RS485, 2×CAN FD | 4×USB3.0, 2×千兆网口, HDMI 2.1, GMSL2, Wi-Fi 6, 蓝牙5.0, RS232/RS485, 2×CAN FD |
| 多机系统支持 | 支持 | 支持 |
技术规格
全面的硬件配置与软件系统参数
激光雷达
- 型号 64线/32线可选
- 探测距离 0.5-200m
- 角分辨率 0.2°×0.2°
- 扫描频率 10Hz/20Hz可选
视觉系统
- 类型 深度视觉系统
- 分辨率 1920×1080
- 帧率 30fps
- 视场角 水平90°×垂直65°
定位系统
- IMU 6轴高精度IMU
- GPS 差分GPS(科研版)
- 定位精度 厘米级(RTK模式)
处理器
- 型号 Nvidia Orin NX
- CPU 6核ARM Cortex-A78AE
- GPU 1024 CUDA Cores
- 内存 8GB/16GB LPDDR5